Block diagram
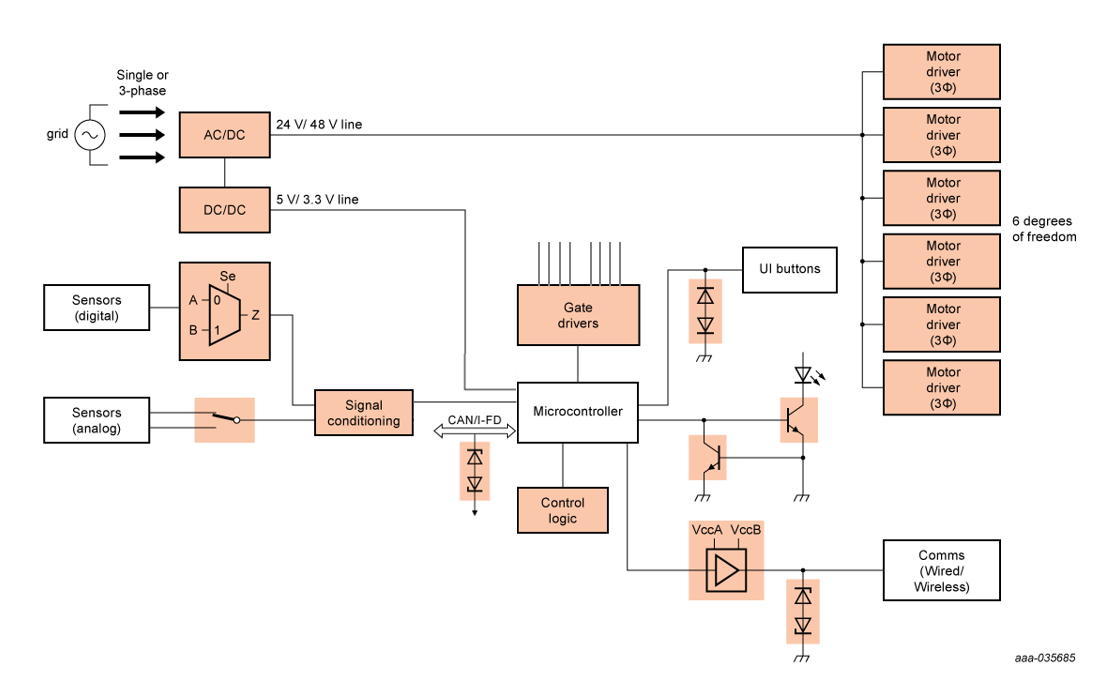
Highlighted components are Nexperia focus products
产品
Products - Power conversion
Products - Control
Products - HMI / MMI
设计考虑因素
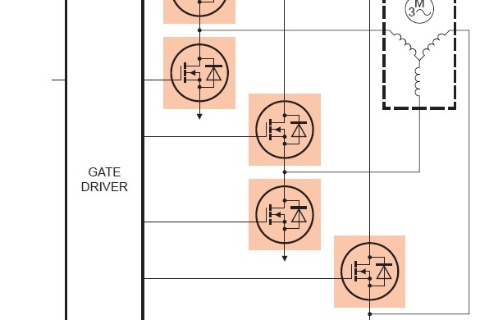
- 开始采用PWM驱动无刷直流电机控制
- 电机驱动MOSFET必须以低RDSon和良好的热阻抗来满足峰值高电流需求
- 如果过载情况会降低电池和栅极电压,则可能需要具有强线性模式性能的MOSFET来提供反向电池保护
- MOSFET可能需要满足UL2595等的具体间距要求
- 为小尺寸优化的电荷平衡MOSFET,通常装在可移动电池组中——每个电池一个
Streamlining Cobot motor drive design efficiency with digital platforms and online resources
We partnered with Wevolver to highlight the significant edge that comprehensive digital resources offer to engineers. Online tools have transformed from mere conveniences to essential cornerstones in cobot design. They offer a bridge over traditional challenges, bringing in an era where design is not just faster, but also more precise, efficient, and forward-thinking.

Cobots
The growth in collaborative robots requires robust and thermally efficient semiconductors. Select the ideal MOSFET for your design using Nexperia's MOSFET selector tool for BLDC Motor (sinusoidal) applications.